


坐标机器人码垛机是码垛机的一种,该码垛关键构成部分由X轴,Y轴,Z轴及永磁电机、自动控制系统和手抓构成。一、机器设备特性:1、可玩性运动,每一个运动可玩性中间空间交角为斜角;2、自动控制系统多次重复程序编写,运动均按程序执行;3、一般由自动控制系统、驱动系统、机械结构、操作设备等构成。4、灵便,应用广,因操作工具的使用不一样作用也不尽相同。5、可靠性高、高速运行、高精密。6、适合于恶劣环境,可长时间工作,有利于操作检修。二、运用优点:1.运用灵便、组装简单融入大小不一、作用繁琐的操作规定,并且融入生产流程转变比较多的场所。它安装及当场布线简单,组成灵活多变的自动控制系统。2.操作便捷,检修非常容易技术工程师编好程序清楚形象化,只需看中操作使用说明,操作工作人员经短期培训班就可以用。此外,PLC具备完备的监控和检测作用,使维修工人能够及时、清晰地分辨故障原因,快速更换故障模块,恢复生产。3.稳定性高,抗电磁干扰性能好,环境适应性强,此外因为结构精致,因此耐高温、防水、抗震等性能也挺好。三、组装保养和座标机器人码垛设备在加快和减速时也会产生强悍的撞击力,并且一般每天都要工作24钟头,因此机器人须被牢固地安装于支撑架上。机器人的支撑架需要一定的抗撞击力,需有底脚,在长时间快速高动态运动影响下,并没有摇晃。除此之外在装修时应确保运动斜齿齿轮的平面度、平整度和水平度。一般机器人的每一个运动轴在通过一长度运动后应周期性根据滚轮的注油孔给直线滑轨充注润滑脂。随机器人使用场景的差异与工作速率不一样,其注油的时间也不尽相同。在食品玻璃切割等领域要选择带防污戴的运动轴和减少注油周期时间,在洒水的场所也需要减少注油周期时间。







码垛机就是把商品按照一定的方法层叠下去,便捷运送。坐标式码垛机选用全自动控制方式,设定好程序流程以后就可以全自动工作。坐标码垛机的抓取方法大多数是依据特殊工作中的需求设计方案,例如货物大小、样子、净重、材料、外力作用物理的标准及其转动环境。依据货物和用途不一样,坐标码垛机一般有三种抓取方法:吸附式、抓取式、直发夹板式。1、吸附式一般用于码垛箱装物件,板才等。能够码垛各种规格包装物件如成袋、箱装、成桶、罐装、板才等。2、抓取式特别适合成桶货物或是不规则物件,也不会因为压挤而形变。3、直发夹板式适用箱装、罐装等。坐标机码垛机主要运用于在自动化技术生产中实行大批工件运送,生产解决及转换等每日任务。它解决了龙门吊码垛机不灵敏与机器人码垛机价钱的价格昂贵,彰显了二者码垛机优点,是市场面很受欢迎的一种码垛机。


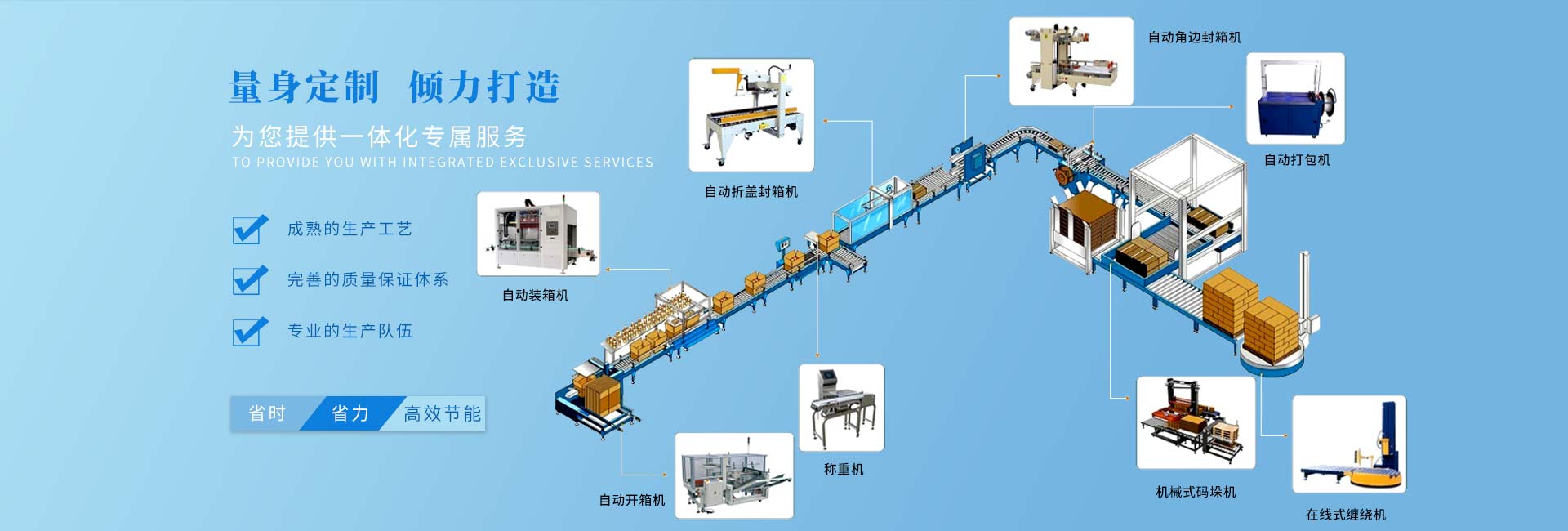
码垛机设备是一种模仿每个人必要控制的主动机械设备。它可以按照设定的程序流程连续攀爬运输商品,完成一个特殊的工艺流程,在各种自然环境下高速运行。它是一种在电力应用中能实现自动控制系统、重复编程和在三维空间随意运动的自动化机器。其组成部分包括平行运动轴、运动轴传动系统、自动控制系统和智能终端。可从不同领域应用,具有日程大、作曲能力强的特点。根据末端实际操作工具的不同用途,坐标码垛机可方便地用于各种自动化机器,如电焊、运输、自动装卸、外包装、码垛、开箱、检验、探伤、分类、安装、贴标、条码、编码软件、喷漆等。




 在线客服
在线客服 13851918388
13851918388 183969645@qq.com
183969645@qq.com


